Team13_Decentralized-Visual-SLAM
Website
Project maintained by decentr-vslam Hosted on GitHub Pages — Theme by mattgraham
Data-Efficient Decentralized Visual SLAM Project
This is a python implementation of a data-efficient approach of Decentralized Visual SLAM. This was implemented by Team 13 (Aishwarya Unnikrishnan, Devesha Tewari, Lu Wen, and Haonan Chang) for the course EECS 568: Mobile Robotics.
Please refer to our report and code.
Overview
Multi-robobot decentralized systems are becoming more popular. However, they typically involve exchanging the entire map data between robots. The corresponding complexity thus scales quadratically with robot count. TO overcome this, we implement a data-efficient method by using a compact a compactimage descriptor leveraging a state-of-the art visual vocabularymethod and only sends data for relative pose estimation fora single matched robot. This reduces the complexity, scaling linearly with robot count. State-of-the-art decentralized pose-graph optimization method using a two stage- distributed Gauss-Seidel approach is also implemented.
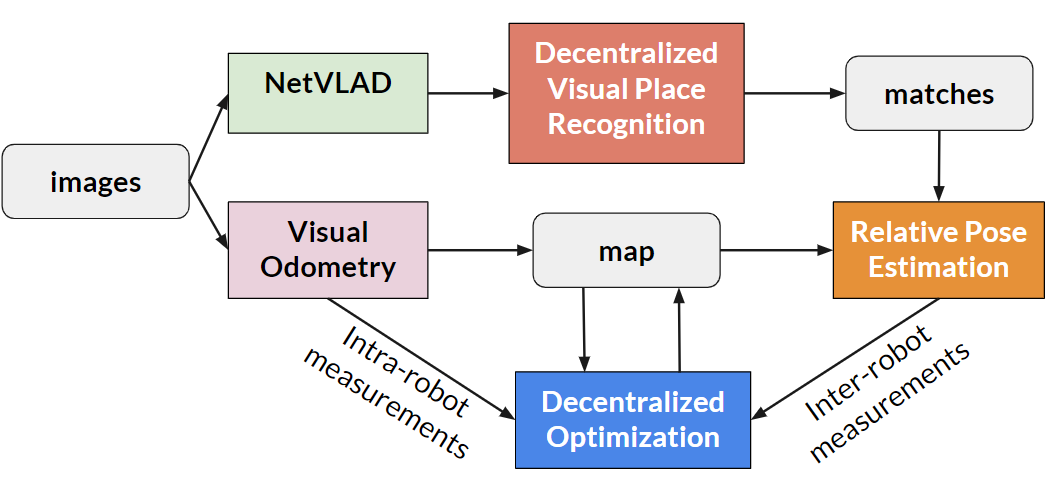
The following diagram shows the modules of our system, which are executed on each robot.
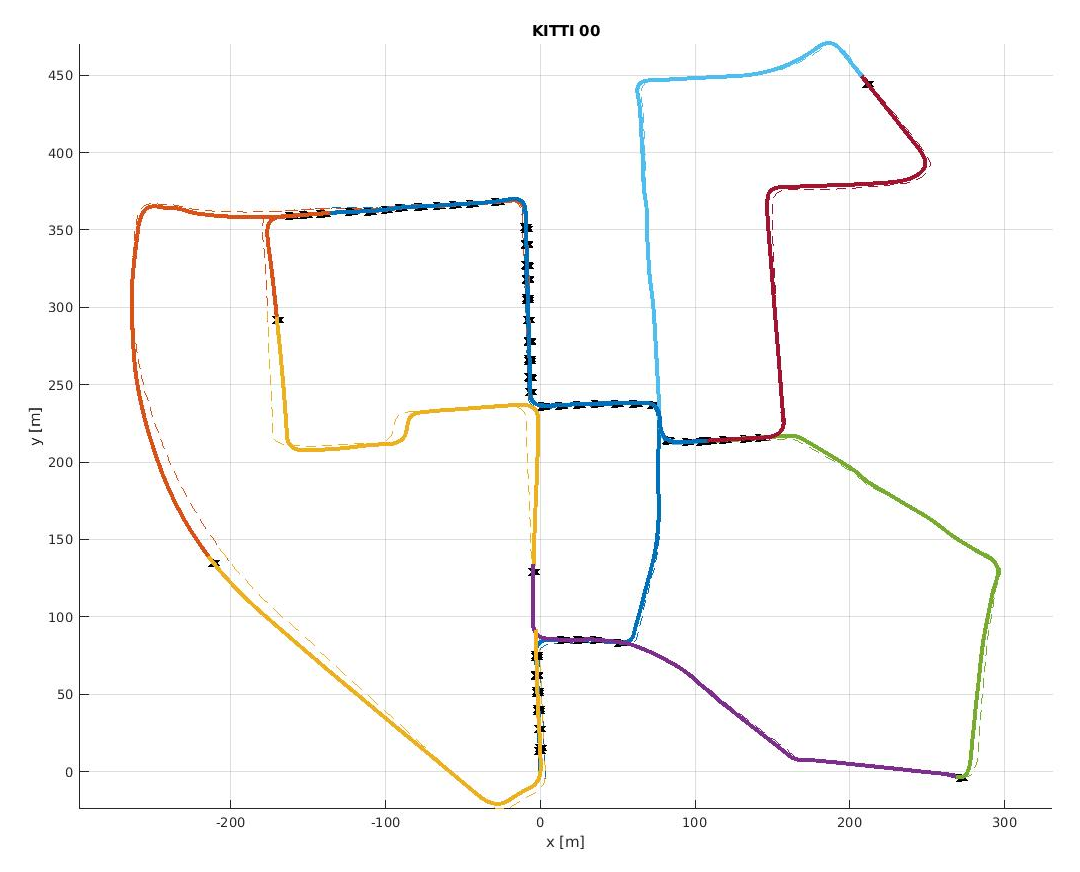
Results
The final plot is made after the simulation was done in Python.